Our friend from Javad GNSS, Michael Glutting, recently related that a surveyor in Minnesota asked how he could use his Triumph-LS and corrections from the MnCORS real time network to accurately work within his projects previously established with HARN. The MnDOT provides mount points for various adjustments of NAD83, however, a surveyor can quickly produce reliable, highly accurate transformation parameters for a local set of known positions as this paper describes.
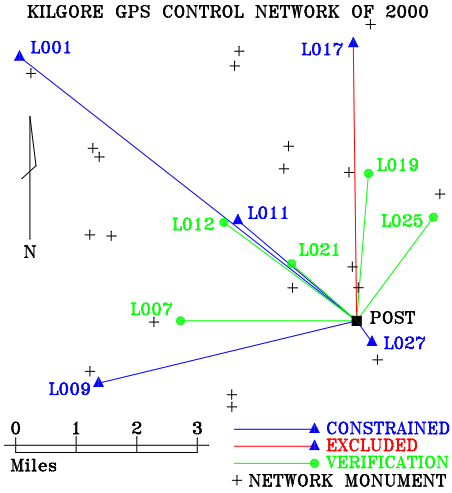
In 2000, Stanger Surveying of Tyler, Texas, established a GPS control network consisting of 30 monuments for my hometown of Kilgore, Texas, over an area measuring about 7 miles square (50 square miles). Even after 15 years, the network proves to be incredibly accurate and was well constructed with ties to two different HARN PACS (High Accuracy Reference Network Primary Airport Control Stations) and multiple repeat and braced vectors. This network predated the modern proliferation of CORS stations, and so there is no precise relation to the CORS and therefore no precise relationship to NAD83_2011. This means that there is some unknown translation from the Kilgore GPS Control Network of 2000 and NAD83_2011. Because of this, we must resolve these transformation values by observation.
To do this, we conducted two field campaigns. In both sessions, I placed a Javad GNSS receiver on a stable monument, POST, located at our office. The first session, I used a Triumph-1, and for the second, I used a Triumph-2, both broadcasting corrections over the Internet via TCP. The NAD83_2011 position of POST has been accurately determined by hundreds of hours of data from several different GPS recievers processed through OPUS.
In the first session, my father, J.D., and I observed five different monuments from the Kilgore network with the Triumph-LS for 90-120 seconds each. These points were the primary control Stanger established from the HARN PACS. After observing those five points I performed a preliminary localization.
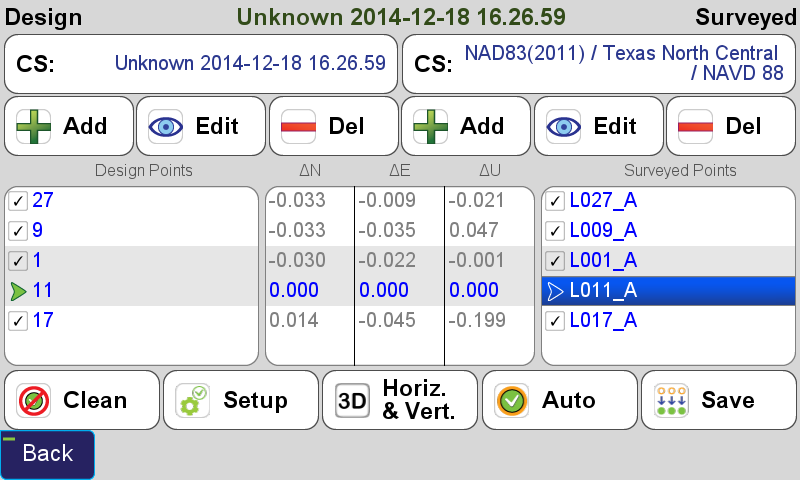
In this preliminary localization, I fixed only one point (point L011_A). Three of the remaining four show very low residuals, however point L017_A, with its noticeably higher vertical residual suggests this point has been displaced since it was established in 2000, or that there is an error in the observation itself - only a repeat occupation will tell.
During the second session, we observed the five points again and used the average tool in J-Field to perform a weighted average of the two points. The second observations showed excellent agreement with the first observations. This chart shows the difference in the repeat observations for each of the five stations:
| STATION | Base-Rover Vector Length (usft) | Δ2D (usft) | ΔUP (usft) |
|---|---|---|---|
| L001 | 37342.3 | 0.097 | -0.029 |
| L009 | 23155.7 | 0.048 | -0.139 |
| L011 | 13559.4 | 0.049 | -0.005 |
| L017 | 24184.6 | 0.036 | 0.033 |
| L027 | 2285.9 | 0.032 | -0.005 |
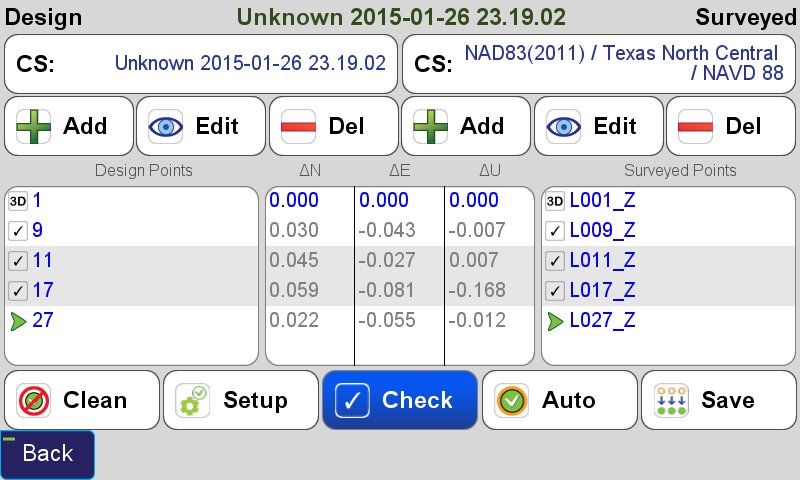
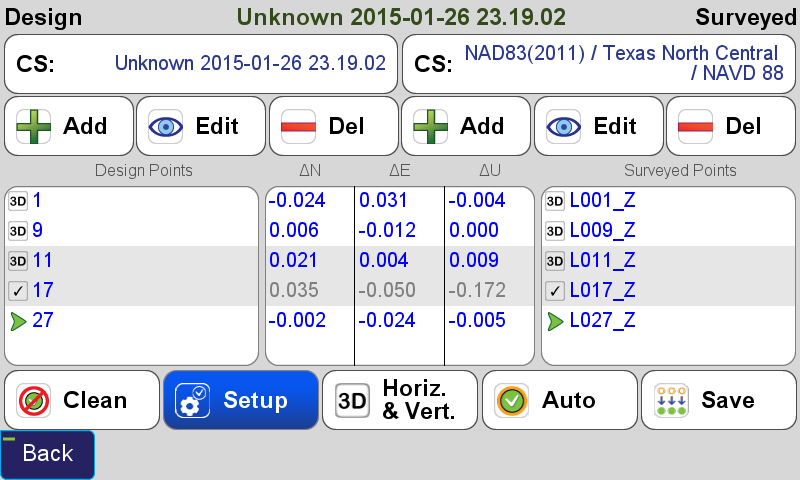
With the five control points averaged, I began the localization process again. First I performed a minimally constrained localization holding only point L001. Notice that point L017 still appears to be an outlier.
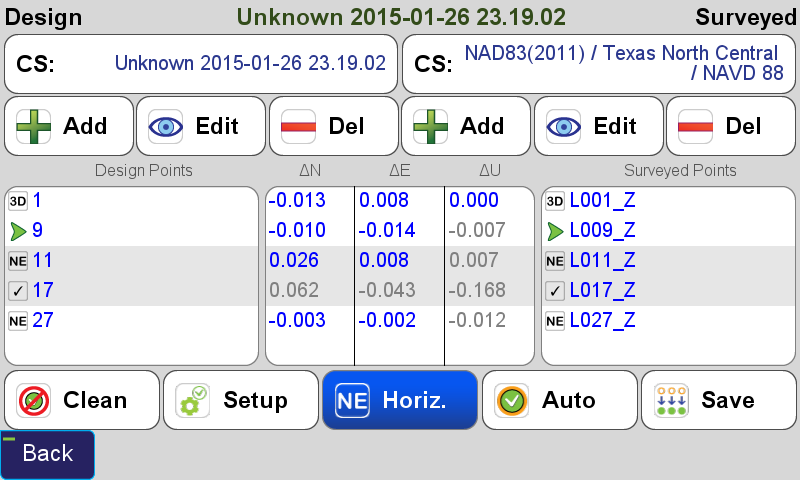
Next, I constrained horizontally to L001, L009, L011 and L027 while still only fixing point L001 vertically. The residuals predictably decrease among the points fixed.
With the residuals indicating a good fit, I turn my attention to the parameters of the localization.
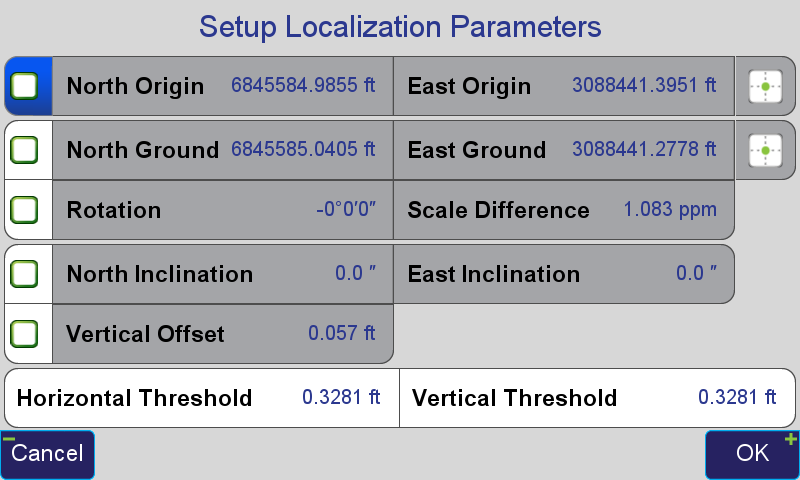
From these parameters, several observations can be made immediately. Because both surveys relied upon the same definition of North, it is expected that there would be little, or no rotation. Furthermore, because both surveys relied upon the same definition of the foot, US Survey foot measured along the same grid surface, Texas Coordinate System of 1983, North Central Zone, there should be little difference in the scale factor. The rotation determined is less than half of one arc second and the scale factor being applied to best fit my survey to Stanger's original work is only 1 part-per-million, revealing very good relative agreement between the surveys.
Finally, I am ready to perform a fully constrained localization, holding all four points (still disregarding the displaced monument L017) both horizontal and vertical.
I set both the rotation and scale to zero as I do not want to redefine North nor the US Survey Foot. Now that more than one point is involved vertically, a tilted plane is calculated. Because the Stanger survey was based on Geoid96 and today's survey is based on Geoid12A, I left the tilt values intact. In this case the inclination values are so small as to be practically insignificant.
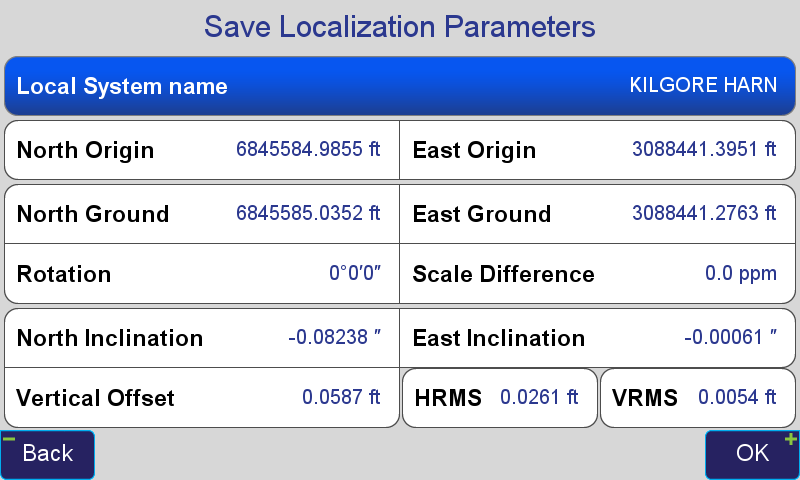
The final results indicate that the translation between the Kilgore GPS Control Network of 2000 and NAD83_2011, epoch 2010, (usft) is N: -0.0497 E: +0.1188 U: -0.0587. From this point forward, I can use this new localization system to survey in coordinates related to the Kilgore GPS Control Network of 2000 with a reference station broadcasting NAD83_2011 corrections, or I can transform coordinates from surveys related to the Kilgore GPS Control Network of 2000 to NAD83_2011.
The final step in this exercise is to use this transformation to test on known points. In order to do this, we observed five additional points from the Kilgore network that were not used in the localization. Each point was observed for 120 seconds with the Triumph-LS with corrections from the Triumph-2 onPOST. The chart below depicts the difference in coordinates determined from the LS using the localization and the original Kilgore GPS Control Network of 2000 coordinates.
| Station | Base-Rover Vector Length (usft) | 2D Residual (usft) | Up Residual (usft) |
|---|---|---|---|
| L007 | 15363.3 | 0.036 | -0.006 |
| L012 | 14416.1 | 0.030 | 0.101 |
| L019 | 12900.9 | 0.025 | 0.001 |
| L021 | 7553.0 | 0.048 | 0.121 |
| L025 | 11238.8 | 0.011 | 0.048 |
These residuals can be attributed to several different sources: orginal survey error, current survey error, displacement over 15 years, as well as errors in the localization/transformation being used. However these results, together with the residuals from the localization, indicate that the localization, as determined, will allow me to reproduce the Kilgore GPS Control Network of 2000 coordinates within a centimeter, anywhere within the network. The total time required to perform this exercise was 4.5 hours in the field (including redundant observations) and 30 minutes of calculations, which were all made within the Triumph-LS.
Shawn Billings, PLS