See video at the bottom of this page.
|
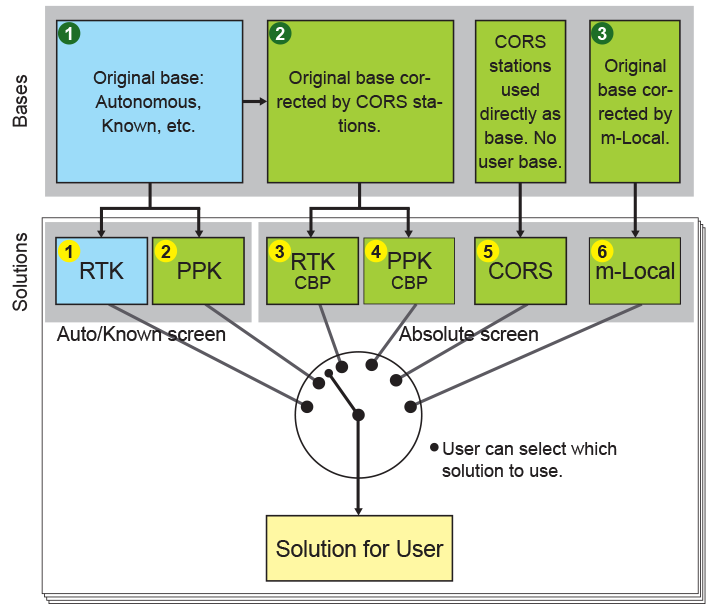
With six RTK engines, auto verify, Confidence and Consistency counters, and validation features of our RTK you are already confident that you have reliable and accurate RTK results. You may have base/rover communication outages in some points and you may want to make sure your base location was correct. You may want to use Autonomous solutions for your base and then find the accurate position. DPOS complements your filed work. With DPOS we check the accuracy of you Base in two ways. One is to post process the Base raw GNSS data with CORS stations and second is to use the known points during your survey and inverse to base. We record the history in three buckets of the “Base” screen. 1) Original base, 2) CORS processed, and 3) m-Local reverse calculations. |
In m-Local reverse calculation of the Base, you can pair as many known points with the points that you have surveyed. We also check the accuracy of the RTK solutions in two ways: 1) we post process your base and rover data and 2) we process your rover data directly with CORS stations, provided that there is enough data for long baseline processing. We record all histories in the following ways: In Base screens there are three buckets for the Original Base, CORS processed Base, and m-Local processed Based. We don’t show the coordinates of the CORS stations. They can be viewed in reports. |
|
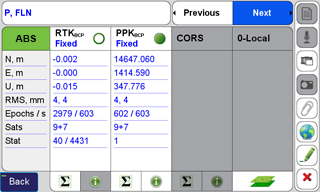
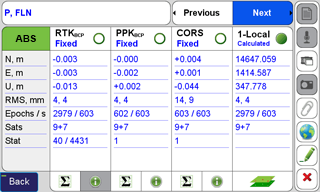
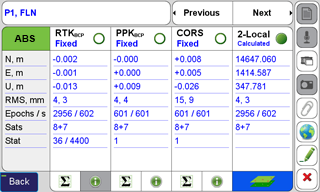
For the Original Base there are two buckets in “Auto/Known” screen: one for the RTK solutions in the field and second for the PPK (Post-Processed Kinematic) based on the Original base. For the CORS processed base, there are two buckets in “Absolute” screen: One for the corrected RTK solutions and one for the PPK based on the corrected base with CORS. For the rover data processed directly with CORS, there is one bucket in the “Absolute” screen. Rover solutions that are corrected with “m-Local” are also shown in the m-Local |
bucket of the “Absolute” screen. So, the six rover solutions are shown in two screens: two in the “Auto/Known” screen and four in the “Absolute” screen. You can view them by clicking the boxes in the upper left of the “Point Detail” screen. We will show one solution as default, but you can change to what you want by clicking the radio button of that point bucket. Buckets in the Base screen are only for information. In the Base screen, the selected coordinate for the base is recorded as the effective position of that base for future use. |
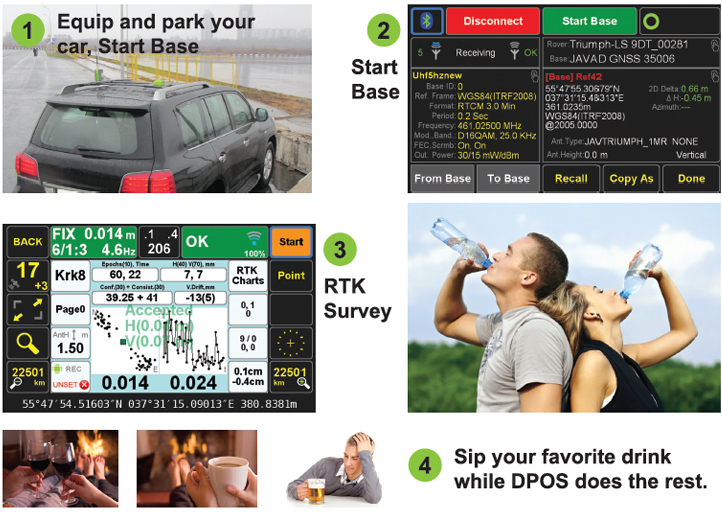
And this is how it works.
Version 2.0.0.208 and later.
Here we explain the process and details of the six solution buckets (in Auto/ Known and Absolute screens) and three buckets of base in Base screen.
|
When survey is done, in Base/Rover Setup screen, download the base data in rover and enter a name for Base. |
|
|
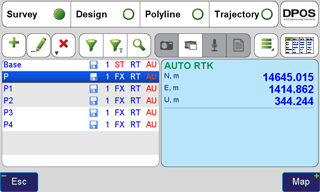
Click “Points” to see the list of points that
you have surveyed. The first in the list
is your base, followed with all the points
that you surveyed relative to that base.
|
|
|
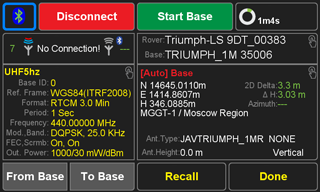
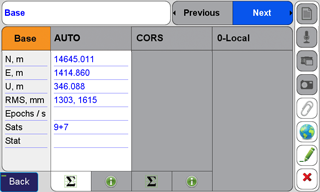
The original Base coordinate is saved in “Auto/Known” bucket of the “Base” screen. |
|
|
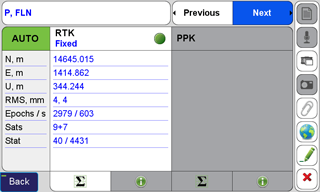
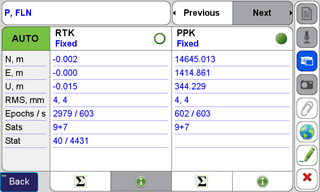
The RTK solution of each point is saved in
the “RTK” bucket of that point in the “Auto”
screen. |
|
|
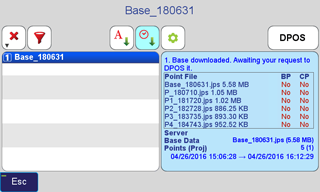
If you want to verify and improve your original solutions click “DPOS” to send your data to DPOS server and do the following tasks automatically and fill the other 5 buckets. |
|
|
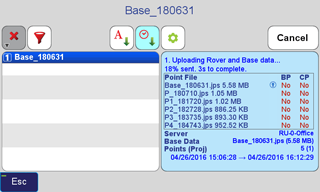
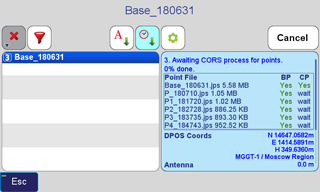
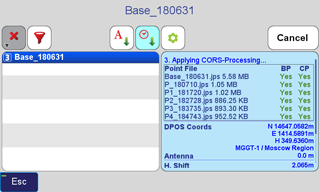
Base and rover data is sent to DPOS. |
|
|
First DPOS will post process the rover data at each point with the Base data and verify that RTK results were correct. The new results are saved in PPK (Post Processed RTK) bucket of each rover point in the “Auto” screen. This will cover any failure at RTK due to communication loss or else. |
|
|
The status and progress of DPOS process is shown in the DPOS screen. |
|
|
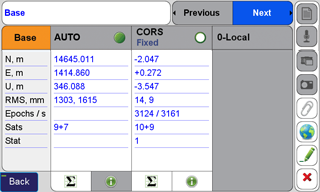
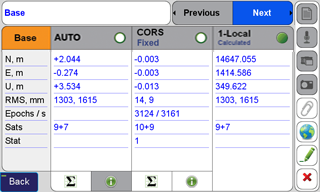
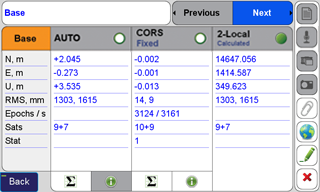
Then DPOS will process the base data with CORS stations and record accurately calculated coordinate of the base in the CORS bucket of the “Base” screen. You could have installed the Base in any location, use Autonomous solution for base and later find its accurate position in DPOS. |
|
|
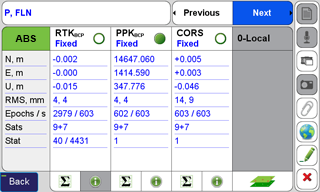
The accurate position of the base calculated with CORS stations is used to adjust the rover RTK solutions and record them in the PPK bucket of each point in the “ABS” (Absolute) screen. As said, you don’t need to know the accurate position of your base. You can toggle the top left button. |
|
|
DPOS also processes all rover data directly with CORS stations (if sufficient data) without need for your own Base station. This is another way to check the accuracy of your RTK. |
|
|
The CORS processed rover points are saved in the CORS bucket of the points in the “ABS” screen. |
|
|
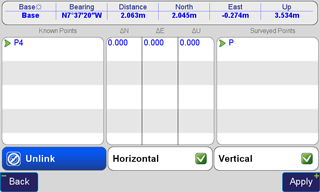
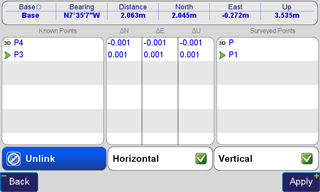
If you know the accurate location of some of the points that you have surveyed, you can use the “m-Local” process to pair them, “reverse calculate” the position of the base. You can do this in the field in real time too. |
|
|
The inversed location of the base is saved in the “m-Local” bucket of the base screen. |
|
|
The adjusted points according the “inverse calculate” base are saved in the m-Local buckets of the points in the ABS screen. With this process you don’t need to know the accurate location of your base or use this to verify your works. |
|
|
You can continue the “m-Local” process with more than one pair and enhance your base and results. |
|
|
The result of newly reverse calculated base is recorded in the m-Local bucket of the Base screen. |
|
|
The impact on points are recorded in m-Local bucket in the ABS screen of each point. |
|
|
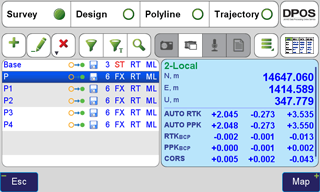
The summary of the six buckets and the one that is selected is shown in the points list screen. You can change the selection in the detail point screen. Shift and GNSS raw data symbols, number of solutions, solution type, Process type, and Base type are shown in columns. |
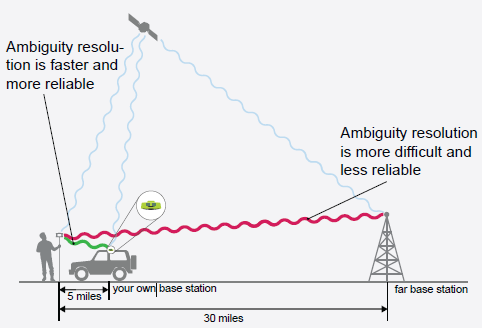
Advantages of your own base station
and short baselines
|
1. Shorter baselines provide significantly better reliability because the ambiguities are much easier to resolve and the correct ambiguity solution has an obvious contrast.
2. Shorter baseline has better accuracy because most of errors (like atmospheric and tropospheric effects) are common and cancel. |
|
3. Shorter baseline ambiguities are resolved much faster. In longer baselines, incorrect ambiguities may pose as being correct in the statistical evaluations and it takes longer to isolate incorrect ambiguities.
4. Shorter baselines make it feasible to work in difficult areas (under tree canopy and in urban environments) because ambiguities have better contrast and are easier to resolve.
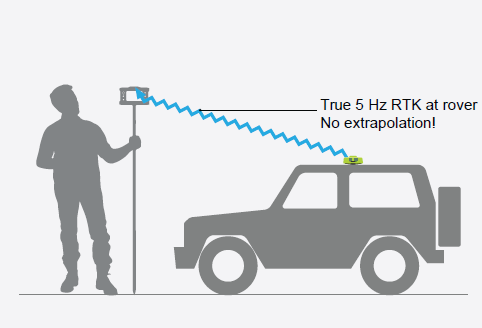
5. Beast Mode RTK is available only via our TRIUMPH-2 and TRIUMPH-1M base station. It makes ambiguity resolution up to 5 times faster because base station transmits base data 5 times per second. 5-Hz Beast Mode RTK is totally different from the up to 100-Hz RTK that is done by extrapolating the same 1-Hz data 100 times per second AFTER the ambiguities are fixed. This extrapolation technique does not improve the ambiguity resolution speed and is mainly used in applications like machine control after the ambiguities are fixed. |
|
|
6. In addition to savings due to speed and reliability, it saves you RTN and communication charges. A complete system, Base + Rover + Radio + Controller & Controller Software, starts at $19,990. 0% financing available ($1,537.69 per month for 13 months) to active license US Professional Land Surveyors (PLS). Extended finance terms also available |
 to see details of base and rover
points details.
to see details of base and rover
points details.